Forschungsinteressen
Materialien

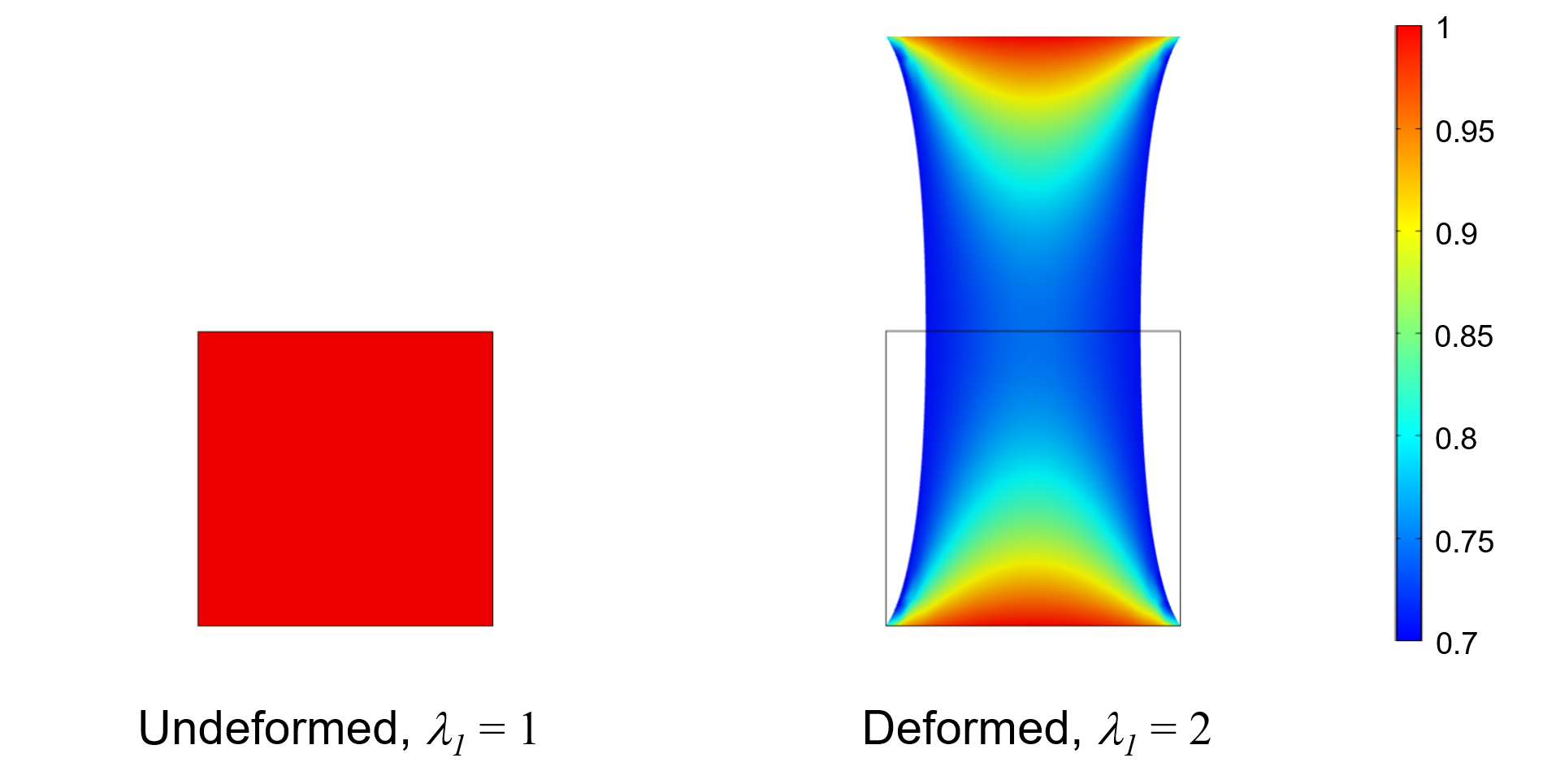
Dielektrische Elastomere (DEs) stellen eine Klasse von elektromechanischen Wandlern dar, die aus dünnen Elastomermembranen (z. B. Silikon, Acryl, Naturkautschuk) bestehen, die beidseitig mit flexiblen Elektroden (z. B. Kohlenstoff-Silikon-Gemisch, dünne Metallfilme) beschichtet sind. Wird an die Elektroden eines DE eine hohe Spannung angelegt, so wirken auf die gespeicherten elektrischen Ladungen elektrostatische Kräfte, die eine Ausdünnung der Membran und damit eine Flächenausdehnung bewirken. Auf diese Weise kann eine kontrollierbare Verformung erreicht werden. DEs zeichnen sich durch große Verformungen (über 100 %), hohe Energieeffizienz und -dichte, hohe Flexibilität, schnelles Ansprechverhalten, geringes Gewicht, Self-Sensing und geringe Kosten aus. Diese einzigartige Kombination von Eigenschaften ermöglicht die Entwicklung von DE-basierten Aktoren, Sensoren und Generatoren mit einer Leistung, die mit herkömmlichen Wandlern nicht erreicht werden kann. Schließlich können Aktorik und Sensorik gleichzeitig ausgeführt werden, indem der sogenannte Self-Sensing ausgenutzt wird, der die Implementierung von Regelungsarchitekturen ohne zusätzliche Positions- oder Kraftsensoren ermöglicht.
Unsere Hauptforschungsinteressen in diesem Bereich sind:
- DE-Materialcharakterisierung
- DE-Material-Modellierung
- DE-Systementwicklung
- DE-Systemmodellierung, Steuerung und Optimierung
- DE-Antriebselektronik
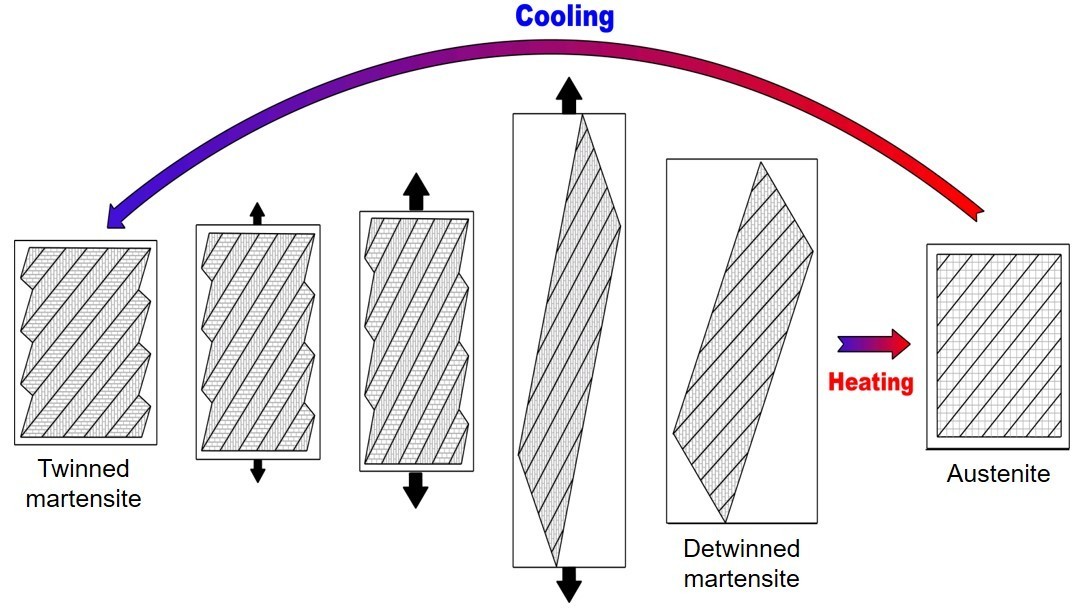
Drähte aus thermischen FormGedächtnisLegierungen (FGL), wie z. B. NiTi-Drähte, stellen eine spezielle Klasse intelligenter Materialien dar, die effektiv für die Entwicklung innovativer mechatronischer Aktoren genutzt werden können. Wird ein elektrischer Strom durch den Draht geschickt, löst die daraus resultierende Joulesche-Wärme eine Phasenumwandlung im FGL-Kristallgitter aus, die zu einer Formänderung von bis zu 4-8% führt. Wird eine Vorspannkraft auf den Draht aufgebracht, z. B. durch eine vorgespannte Feder, nimmt der FGL nach Wegnahme des Stroms wieder seine ursprüngliche Form an. Ein solches Prinzip kann effektiv genutzt werden, um muskelähnliche Bewegungsabläufe zu ermöglichen. Im Vergleich zu konkurrierenden Technologien zeichnen sich FGL durch eine hohe Energiedichte (bis zu 10 J/cm3) aus, die es erlaubt, kompakte und leichte Aktoren zu entwickeln. Darüber hinaus ist es möglich, den Widerstand des Drahtes mit seiner Verformung in Beziehung zu setzen, was den Einsatz von FGL als selbstfühlende Aktoren ermöglicht.
Unsere Hauptforschungsinteressen in diesem Bereich sind:
- FGL-Materialcharakterisierung
- FGL-Material-Modellierung
- Entwicklung von FGL-Systemen
- Modellierung, Steuerung und Optimierung von FGL-Systemen
- FGL-Ansteuerungselektronik
Methoden
Mathematische Modelle sind der Ausgangspunkt für das richtige Verständnis, die Optimierung und die Kontrolle von leistungsstarken intelligenten Materialsystemen und deren Anwendungen. Bei APS stellt die Entwicklung von mathematischen Modellen und Simulationswerkzeugen einen grundlegenden Teil der Forschungsaktivitäten dar. Wir entwickeln physikalisch basierte Modelle auf der Grundlage verschiedener Techniken und Frameworks, die für unterschiedliche Anwendungen und Anforderungen genutzt werden können, z. B. Optimierung, Simulation und Steuerung. Obwohl die meisten unserer Modellierungsuntersuchungen an intelligenten Materialien und -systemen durchgeführt werden, sind wir auch an mechatronischen Systemen im Allgemeinen interessiert.
Unsere Hauptforschungsinteressen in diesem Bereich sind:
- Modellierung von intelligenten Materialien
- Modellierung von Aktoren, Sensoren und Generatorsystemen aus intelligenten Materialien
- Lebensdauermodellierung und Schadensmodellierung von intelligenten Materialien
- Hysterese-Modellierung
- Energiebasierte Modellierung von Multiphysiksystemen
- Port-Hamiltonsche Modellierung
- Hybride dynamische Modellierung
- Finite-Elemente-Modellierung
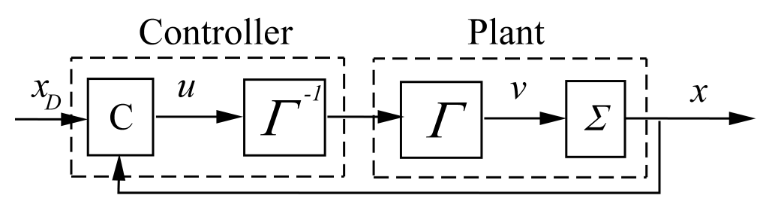
Um einen schnellen, genauen und effizienten Betrieb in intelligenten Materialsystemen zu gewährleisten, ist die Entwicklung von Regelalgorithmen von grundlegender Bedeutung. Bei APS konzentrieren wir uns auf die Entwicklung und Implementierung von Regelalgorithmen für verschiedene Arten von smarten Materialsystemen und mechatronischen Aktoren im Allgemeinen. Unsere Forschung auf dem Gebiet der Steuerung umfasst sowohl theoretische als auch praktische Aspekte, die für die Steuerung von Bewegung, Kraft und Interaktion in physikalischen Systemen relevant sind.
Unsere Hauptforschungsinteressen in diesem Bereich sind:
- Regelungsmethoden für intelligente Materialsysteme
- Hysteresekompensation und -regelung
- Bewegungssteuerung
- Kraft-/Wechselwirkungsregelung
- Robuste Regelung
- Optimale Regelung
- Energiebasierte Regelung
- Implementierung der Steuerung
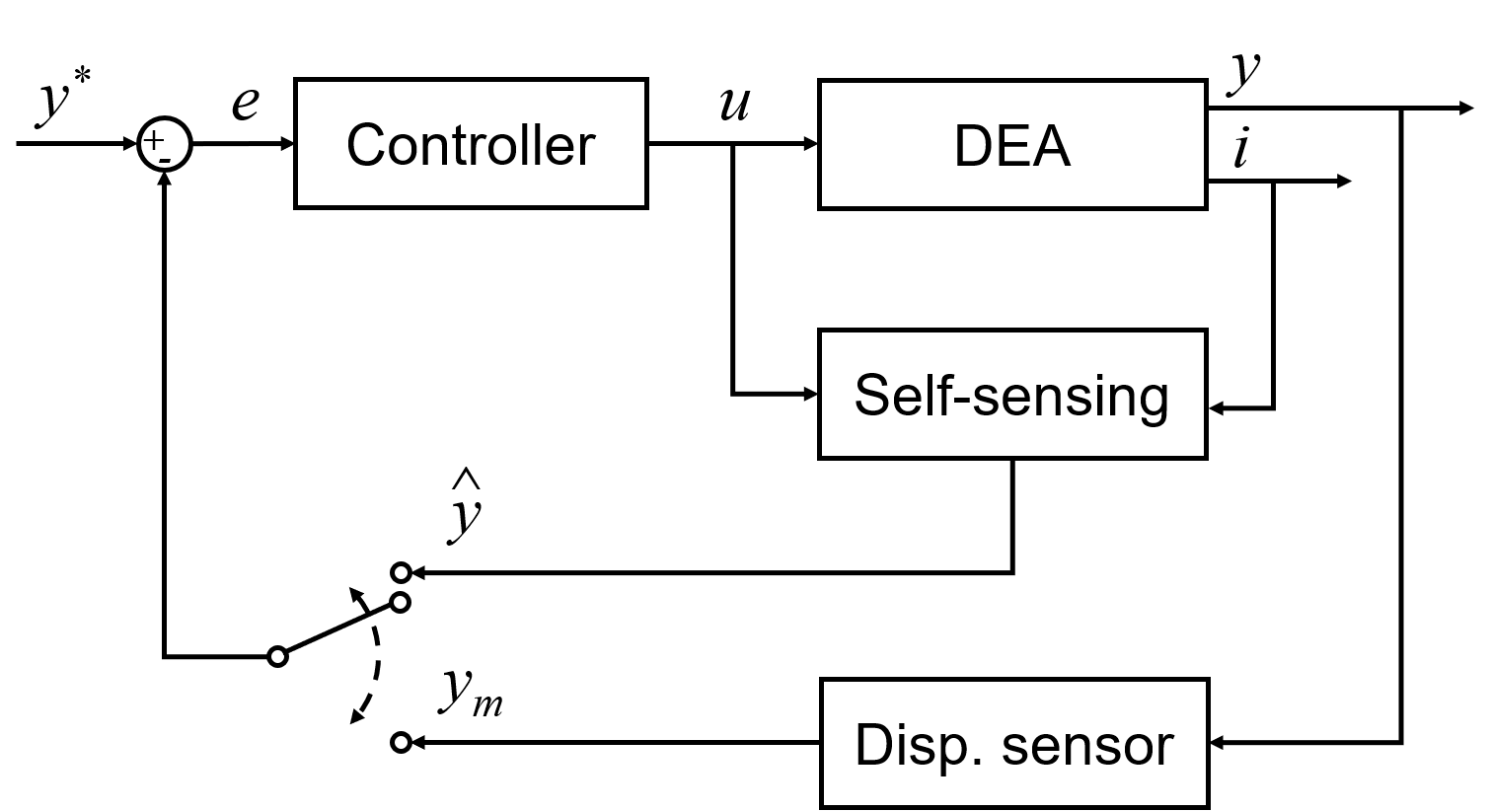
Einer der Hauptvorteile von intelligenten Materialien ist die sogenannte self-sensing, d. h. die Möglichkeit, den Wandler gleichzeitig als Aktor und als Sensor zu verwenden. Diese Betriebsart ermöglicht es, die Größe und die Kosten eines Smart-Material-Systems zu reduzieren, ohne dabei alle Vorteile der Rückkopplungssteuerung aufzugeben. Bei APS konzentrieren wir uns auf die Entwicklung und Implementierung von Self-Sensing-Architekturen für verschiedene Arten von Material-Systemen. Indem wir die Möglichkeit bieten, die Materialgeometrie und/oder die Kraft während der Aktuierung abzuschätzen, ermöglichen wir die Entwicklung multifunktionaler Systeme.
Unsere Hauptforschungsinteressen in diesem Bereich sind:
- Kapazitive Self-Sensing Methoden für DE
- Reistive Self-Sensing Methoden für FGL
- Self-Sensing-Methoden für hysteretische Systeme
- Self-Sensing für intelligente Aktoren mit mehreren Freiheitsgraden
- Simultane Kraft- und Weg-Self-Sensing
- Sensorlose Regelung
- Online-Selbstüberwachungen
- Self-Sensing Hardware entwicklung
- Implementierung von Self-Sensing-Architekturen

Die experimentelle Validierung der entwickelten Regelungs- und self-sensing Algorithmen stellt einen wesentlichen Aspekt unserer Forschung dar. Die experimentelle Validierung von intelligenten Algorithmen wird am APS auf zwei Ebenen realisiert. Einerseits ermöglichen fortschrittliche Simulink-basierte FPGA-Architekturen ein schnelles Prototyping von komplexen Echtzeit-Algorithmen. Andererseits erfordert die Entwicklung integrierter intelligenter Aktoren und Anwendungen, dass die Algorithmen in kompakten Mikrocontroller-Architekturen implementiert werden.
Unsere Hauptforschungsinteressen in diesem Bereich sind:
- Experimentelle Validierung von Steuerungs- und Selbsterkennungsalgorithmen
- Algorithmenintegration in Hochleistungs-FPGA-Systeme für Rapid Prototyping
- Integration von Algorithmen in Echtzeit-Mikrocontroller-Architekturen
Anwendungen
Konventionelle Roboter basieren häufig auf starren Strukturen und Aktoren, um Manipulationsaufgaben auszuführen. Obwohl sie in industriellen Umgebungen weit verbreitet sind, erscheinen starre Roboter aufgrund von mangelnder Flexibilität, hohem Gewicht und hoher Sicherheitsanforderungen moderner Anwendungen oft ungeeignet. Ein relevantes Beispiel ist der Bereich der Mensch-Roboter-Kooperation, in dem starre Strukturen eine Gefahr für einen menschlichen Benutzer darstellen können. Diese neuen Anforderungen haben das Interesse an dem Gebiet der Soft-Robotik geweckt. Dieser Begriff bezieht sich auf Roboter, bei denen inhärent weiche Materialien für die Konstruktion der Struktur sowie der Aktoren-/Sensorkomponenten verwendet werden. Die verbesserten Nachgiebigkeits- und Sicherheitseigenschaften von Soft-Robotern ermöglichen die Entwicklung neuartiger Anwendungen und Paradigmen der Mensch-Roboter-Interaktion. Gleichzeitig ermöglicht die Verfügbarkeit weicher und sehnenartiger Aktoren die Realisierung von Kontinuum-Roboterstrukturen, deren große Anzahl von Freiheitsgraden es erlaubt, komplexe Bewegungsmuster zu erreichen, die mit konventionellen starren Robotern nur schwer oder gar nicht realisierbar sind. Aufgrund ihrer einzigartigen Mischung aus Nachgiebigkeit, großer Verformungen und geringem Gewicht stellen intelligente Materialien wie DE und FGL eine geeignete Technologie dar, um Aktorik und Sensorik in Kontinuum/Soft-Robotern zu realisieren.
Unsere Hauptforschungsinteressen in diesem Bereich sind:
- Weiche Roboter auf Basis von DE-Wandlern
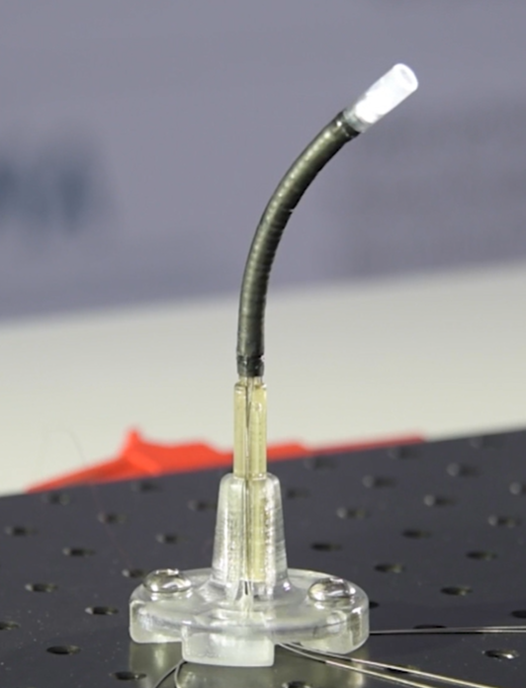
- Kontinuumsroboter auf Basis von FGL-Wandlern
- Neuartige Konzepte für Kontinuum/Weichroboter auf der Basis von intelligenten Materialien
- Entwicklung von Kontinuum/Softroboter-Systemen
- Herstellung von Kontinuum/Softroboter-Systemen
- Charakterisierung von Kontinuum/Softroboter-Systemen
- Modellierung von Kontinuum/Softroboter-Systemen
- Bewegungs- und Interaktionssteuerungsmethoden für Kontinuum/Soft-Roboter
- Self-Sensing-Methoden für Kontinuum/Soft-Roboter

Bis heute basieren die meisten DE-Anwendungen im kleinen Maßstab auf Systemen mit einem Freiheitsgrad, bei denen nur ein aktives Element in einer Stand-alone-Konfiguration verwendet wird. Im Gegensatz dazu kann ein kooperatives System erreicht werden, wenn viele DE-Aktuatoren in einer Array-ähnlichen Konfiguration integriert und in einer synergetischen Weise betrieben werden. Durch die Kombination der intrinsischen Nachgiebigkeit, Energieeffizienz und Self-sensing Eigenschaften von DE-Aktoren mit kooperativen Steuerungsparadigmen kann eine neue Generation von verteilten Mikroaktoren entwickelt werden, die potenzielle Anwendungen in Bereichen wie Soft-Robotik, verteilte Akustik, Wearables und Wellengeneratoren haben, um nur einige zu nennen. Daher (oder: Diesbezüglich) arbeiten wir am APS einerseits an der Entwicklung neuartiger Konzepte für weiche Aktoren und Arrays, und untersuchen andererseits neuartige Modelle und Regelungsalgorithmen, die einen kooperativen Betrieb sicherstellen.
Unsere Hauptforschungsinteressen in diesem Bereich sind:
- Entwurf und Herstellung von vollpolymerbasierten weichen Aktoren
- Entwurf und Modellierung von nachgiebigen bi-stabilen Mechanismen
- Designkonzepte für hochleistungsfähige verteilte Arrays von weichen DE-Aktoren
- Herstellung und Charakterisierung von verteilten Arrays aus weichen DE-Aktoren
- Physik-basierte Modellierung von verteilten Arrays von Soft-DE-Aktoren
- Kooperative Steuerung und Selbsterkennungsalgorithmen für verteilte Arrays von Soft-DE-Aktoren

Als weiteres Forschungsfeld konzentriert sich ad APS auf die Entwicklung neuer polymerbasierter Lautsprecherkonzepte, bei denen die schwingende Membran und der Aktor in einer DE-Membran vereint sind, die an beliebige Formen angepasst oder in tragbare Textilien integriert werden kann. Im Vergleich zu konventionellen akustischen Geräten nutzen diese DE-basierten Lautsprecher die Vorteile von Schwingungen, die durch das direkte Anlegen einer Spannung an die akustische Membran induziert werden, ohne dass externe Aktoren benötigt werden. Experimentelle Untersuchungen mit Laservibrometern werden mit mathematischen Studien zum modalen Verhalten und zur Schallwellenausbreitung von DE-Lautsprechern kombiniert. Das Verständnis der in DE-Lautsprechern auftretenden elektro-hyperelastisch-fluidischen Wechselwirkungen eröffnet die Möglichkeit, neuartige Systeme und Konzepte zu entwickeln, wie z.B. verteilte Arrays aus DE-Mini-Lautsprechern oder multifunktionale DE-Aktoren, die in der Lage sind, eine niederfrequente Ansteuerungsaufgabe zu realisieren und gleichzeitig ein akustisches Signal zu erzeugen.
Unsere Hauptforschungsinteressen in diesem Bereich sind:
- Neuartige Konzepte für flexible und verteilte DE-Lautsprecher
- Design und Herstellung von DE-Lautsprechern
- Optimierung von DE-Lautsprechern
- Charakterisierung und Modalanalyse von DE-Lautsprechern
- Modellierung und Simulation von DE-Lautsprechern
- Mehrfeldmodellierung von elektro-hyperelastisch-fluidischen Wechselwirkungen
- DE-Lautsprecher Regelungsstrategien